









































- Obra maestra sa mundo 2021/02/02 UP
-
Obra maestra sa buong mundo #33
Gumagawa ng mga pagsukat habang nagka-clamp ng mga workpiece
Nakakatulong sa pagtitipid sa labor at mas mataas na produktibidad
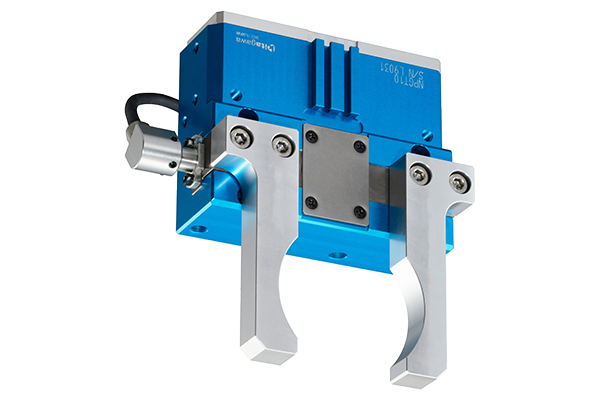
Thin 2-jaw Parallel Gripper Scale Specification “NPGT_S”

- Tag
-
- Peripherals
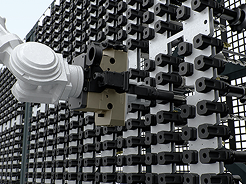
Ang mga linya ng produksiyon ng awtomasyon ay nangangailangan ng inspeksyon sa mga proseso ng machining, mula sa suplay ng materyales hanggang sa pagkumpleto ng machining, upang matiyak na sumusunod ang mga form ng workpiece gaya ng tinukoy. Nangangailangan ito ng mga lugar, inspector, at oras upang gumawa ng mga pagsukat, na bilang resulta ay humahantong sa mas mababang produktibidad.
Maaaring kumapit ang mga foreign substance at/o chip sa mga gripped area. Kapag hindi wastong na-clamp ang mga workpiece, maaari itong magresulta sa pagsususpinde ng mga linya ng awtomasyon dahil sa pagkabigo sa machining na dulot ng pagkahulog ng workpiece sa panahon ng paglilipat o hindi magandang pagpoposisyon ng workpiece sa sumusunod na proseso.
Narito ang manipis na 2-jaw Parallel Gripper Scale Specification “NPGT_S” ng Kitagawa Corporation upang matugunan ang naturang problema.
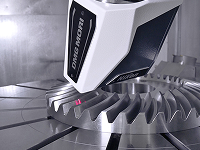
Mataas na katumpakan, mahusay na tibay na nakamit sa pamamagitan ng kaalaman sa paggawa ng chuck para sa mga lathe
Kasabay ng pagsulong ng awtomasyon sa shop floor, ang mga robot hand ay nakakakuha ng atensyon sa industriya. Ang NPGT_S ay binuo bilang isang produkto na nilagyan ng mataas na antas ng repeat gripping accuracy, rigidity, at durability.
Ang manipis na 2-jaw parallel gripper na “NPGT_S” ay hindi lamang nagka-clamp at naglilipat ng mga workpiece, ngunit sinusukat din ang haba ng workpiece sa pagitan ng mga hand jaw. Nagtagumpay ang kumpanya sa paglikha ng makabagong produktong ito sa pamamagitan ng paggamit ng kaalamang nakuha mula sa mahabang taon na karanasan sa pagma-manufacture ng mga chuck.
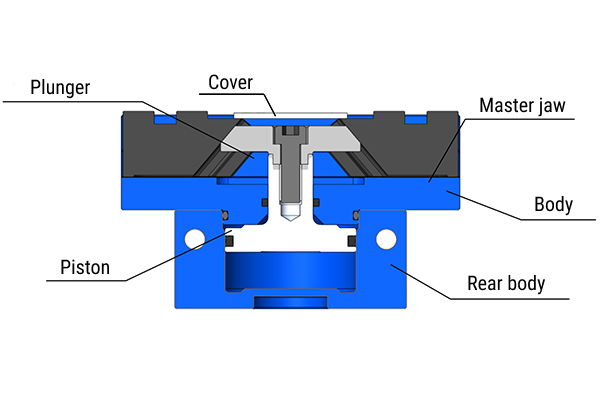
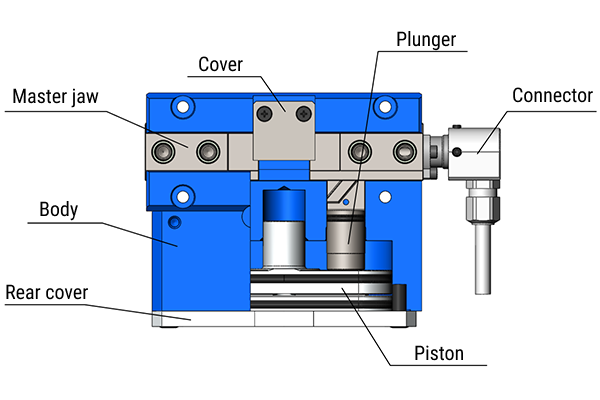
Ginamit ang ellipse piston upang makamit ang isang manipis na istraktura at mataas na gripping force
Sa NPGT_S, ang piston ay nakalagay sa gilid ng master jaw, kaya 39% na mas manipis ang istraktura. Bilang resulta, may kakayahan ang gripper na maglipat ng mga workpiece sa makitid na mga puwang at lugar na may mga limitasyon sa taas.
Ipinagmamalaki ng NPGT10S type ang jaw stroke (diametro) na 20.8 mm, at O.D. gripping force na 1,000N (general purpose type: 610N) dahil ang pressure receiving area ng piston sa gilid ng master jaw ay pinalawak sa maximum na degree.
Matitiyak din nito ang gripping force na 1.6 beses na mas malakas kaysa sa iba pang mga general-purpose type na may katumbas na stroke at paglilipat ng mabibigat na workpiece.
Mas kaunting inspeksyon sa pamamagitan ng pagso-sort ng mga depektibong produkto habang inililipat ang mga ito
Naka-built in sa parallel gripper na ito ang magnetic scale at reader na may mataas na katumpakan ng Magnescale upang sukatin ang haba sa pagitan ng hand jaw at i-check ang mga value.
Ang pamamaraan ng pagsukat ay ang pag-clamp ng scale sa isang master workpiece upang matukoy ang reference value, at sinusukat ang haba sa pagitan ng mga hand jaw upang suriin kung ang value ay nasa loob ng tolerance.
Ang produkto ay nagbibigay ng mga sumusunod na pakinabang.
1. Maaaring i-sort at alisin ang mga depektibong produkto nang maaga nang walang pagsuspinde makina.
2. Dahil masusukat ang haba ng workpiece habang hawak ng isang robot hand; mababawasan ang oras, lugar, at labor para sa inspeksyon.
3. Ang pagsukat ay itinuturing bilang “100% na inspeksyon,” na nagbibigay-daan sa traceability.
4. Patiunang maiiwasan ang pagkabigo ng makina sa pamamagitan ng paghahanap ng mga foreign particle at chip na nakadikit sa mga gripped area.
5. Matatantiya ang panahon ng pagmamantini sa pamamagitan ng pag-check sa mga pagbabago sa kondisyon ng jaw sa paglipas ng panahon sa pamamagitan ng pag-monitor sa mga open/close na posisyon ng jaw.
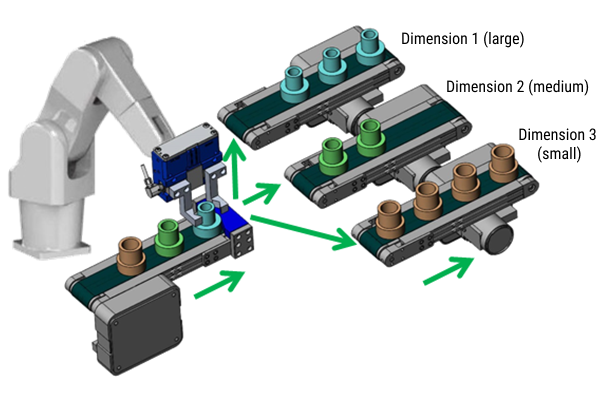
6. Posible ang maramihang gawain kabilang ang paglilipat ng workpiece. Halimbawa, maaaring sukatin ng gripper ang dimensyon ng mga workpiece habang inililipat at sino-sort ang mga ito ayon sa laki.
Komento ng Kostumer:
- “Nakakatulong upang maiwasan ang hindi inaasahang pagsususpinde ng produksiyon at matiyak ang traceability.”
- “Ang mga chip na mahirap makita ay nananatili kung minsan sa mga na-machine na workpiece. Gamit ang robot hand, maaari kaming magsagawa ng 100% na inspeksyon at i-check na walang chip na natitira. Nakakatulong ito sa amin na maiwasan ang pagkakaroon ng mga depektibong produkto.”
Nagbibigay ng ilang karagdagang halaga: nakakatipid sa labor sa paglilipat at inspeksyon ng workpiece
Binabawasan ng NPGT_S, na may kakayahang sukatin ang haba ng gripped area, ang oras ng paggawa at nakakatulong para makatipid sa labor, makatipid ng enerhiya, at mabawasan ang oras para makumpleto ang isang gawain.
Dahil ang gripper ay maaaring ikabit sa mga umiiral nang robot pati na rin sa mga bago, makakatipid sa gastos ng pag-integrate nito. Nakatanggap ang produkto ng magagandang review mula sa mga kostumer na gumagamit na nito. Malaki ang maitutulong ng NPGT_S sa iyong automated shop floor.
![]()
| Kitagawa Corporation 77-1 Motomachi, Fuchu City Hiroshima, Japan 726-8610 URL:https://www.kitagawa.com/ |
Ipinapakilala ng artikulo ang hanay ng mga obra maestrang equipment sa buong mundo ng DMG MORI.